Development Kit
The development kit contains Python code for the following purposes:
- Reading and mapping of the labels used for the different tasks.
- Easy-to-use visualization tools to show the point clouds and the labels.
- Evaluation scripts used to generate the results in the paper and the evaluation server.
- Validation scripts to check your submission before uploading to the Codalab Competition.
See our github repository: https://github.com/PRBonn/semantic-kitti-api for the code and more information.
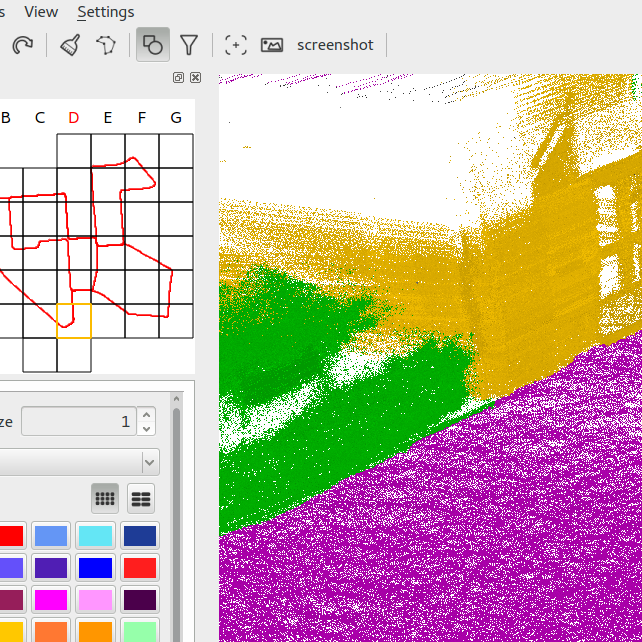
Point Cloud Labeler
The whole project was only possible by using an efficient tool that allows us to label millions of points. We exploit OpenGL to render, but also process the data efficiently.
Our labeling tool provides the following features and capabilities:
- Different tools to annotate the point cloud data, including polygon-based or brush-based labeling and filtering.
- Human-readable label description files in xml allow to define label names, ids, and colors.
- Show multiple scans, but also single scans for every time step.
- Filter points based on lables, but also position to a adjustable plane.
See our github repository: https://github.com/jbehley/point_labeler for the code and more information.
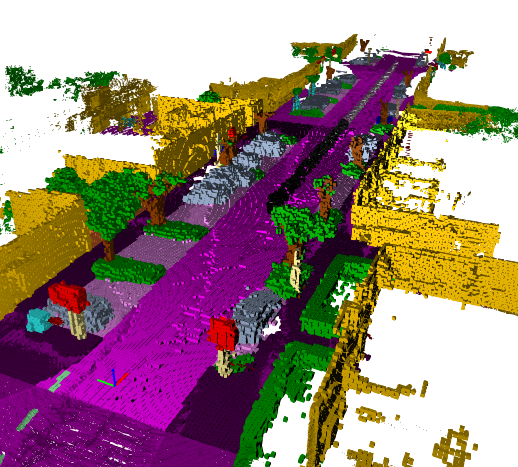
Voxelizer
For generating the scene completion dataset, we use this tool to generate the voxel grids. Our tool provides:
- Visualization of the voxel grids and labels for train and test set.
- Saving of the binary files.
- Generation of all files for a given sequence.
See our github repository: https://github.com/jbehley/voxelizer for the code and more information.
Issues
If you have issues or questions regarding the website or the competition, please use the issue tracker on github.